Archive for 2007
Создан вечный генератор тока для миниатюрных устройств
- Тип контента: Новостная статья
- Номер документа: 1958
- Название документа: Создан вечный генератор тока для миниатюрных устройств
- Номер (DOI, IBSN, Патент): Не заполнено
- Изобретатель/автор: Не заполнено
- Правопреемник/учебное заведение: Не заполнено
- Дата публикации документа: 2007-07-06
- Страна опубликовавшая документ: Россия
- Язык документа: Русский
- Наименование изделия: Не заполнено
- Источник: http://www.membrana.ru/particle/11683
- Вложения: Не заполнено
- Аналитик: Ридна Украина)))
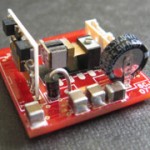 Крошечный генератор электричества на даровом источнике энергии разработали Стивен Биби (Steve Beeby) и его коллеги из университета Саутгемптона (University of Southampton).
Крошечный генератор электричества на даровом источнике энергии разработали Стивен Биби (Steve Beeby) и его коллеги из университета Саутгемптона (University of Southampton).
Категория: Энергия | Нет комментариев »
Electrostatic actuator with fault tolerant electrode structure
- Тип контента: Патент
- Номер документа: 5232
- Название документа: Electrostatic actuator with fault tolerant electrode structure
- Номер (DOI, IBSN, Патент): US007239065B2
- Изобретатель/автор: Horst R.W.
- Правопреемник/учебное заведение: Tibion Corporation, Moffett Field, CA, USA
- Дата публикации документа: 2007-07-03
- Страна опубликовавшая документ: США
- Язык документа: Английский
- Наименование изделия: Не заполнено
- Источник: http://www.google.com/patents/US7239065
- Вложения: Да
- Аналитик: Дмитрий Соловьев
 A high-power electrostatic actuator comprising rotor and stator layers with fault-tolerant electrode structures, a housing to contain the electrodes and dielectric fluid, and electronic circuitry driving a plurality of high-voltage phases. The actuator is constructed from multiple rotor and stator films separated by spacing elements. The electrode structure provides self-alignment for precise assembly. The actuator assembly includes built-in fine-position sensors to allow optimal timing in powering phases, and a coarse position sensor for feedback control. The electrode structure has a large region of linear force to provide low torque-ripple allowing simple high/low voltage pulsing instead of analog high voltage waveforms. Single or double sided flexible circuit manufacturing techniques are used to fabricate the rotor and stator films at low cost.
A high-power electrostatic actuator comprising rotor and stator layers with fault-tolerant electrode structures, a housing to contain the electrodes and dielectric fluid, and electronic circuitry driving a plurality of high-voltage phases. The actuator is constructed from multiple rotor and stator films separated by spacing elements. The electrode structure provides self-alignment for precise assembly. The actuator assembly includes built-in fine-position sensors to allow optimal timing in powering phases, and a coarse position sensor for feedback control. The electrode structure has a large region of linear force to provide low torque-ripple allowing simple high/low voltage pulsing instead of analog high voltage waveforms. Single or double sided flexible circuit manufacturing techniques are used to fabricate the rotor and stator films at low cost.
Категория: Патенты | Нет комментариев »
Improvement of balancing accuracy of robotic systems: Application to leg orthosis for rehabilitation devices
- Тип контента: Научная статья
- Номер документа: 3464
- Название документа: Improvement of balancing accuracy of robotic systems: Application to leg orthosis for rehabilitation devices
- Номер (DOI, IBSN, Патент): 10.1016/j.mechmachtheory.2007.05.002
- Изобретатель/автор: Ghazaryan S., Arakelian V.
- Правопреемник/учебное заведение: Département de Génie Mécanique et Automatique, Institut National des Sciences Appliquées (I.N.S.A.) de Rennes, Rennes, France
- Дата публикации документа: 2007-07-02
- Страна опубликовавшая документ: Франция
- Язык документа: Английский
- Наименование изделия: Не заполнено
- Источник: http://www.sciencedirect.com/science/article/pii/S0094114X07
- Вложения: Да
- Аналитик: Дмитрий Соловьев
") The balancing of robotic systems is an important issue because it allows significant reduction of torques. However the literature review shows that the gravity balancing of robotic systems is carried out by weightless springs. For many balancing schemes it is the source of errors. This paper deals with an analytically tractable solution for the gravity balancing considering the spring mass. For this purpose, the relationship between the stiffness coefficient of the spring and its mass is provided. Then this relationship is introduced into the balancing equation and spring elastic force is determined taking into account its mass. For zero length springs, the stiffness coefficient of the springs is determined from a quadratic equation and for non-zero length springs from a cubic equation. In this way, an exact balancing of gravitational forces is achieved, which allows improving the balancing accuracy of robotic systems. The efficiency of the suggested approach is illustrated by numerical examples. An application to the balancing of the leg orthosis for robotic rehabilitation is also presented.
The balancing of robotic systems is an important issue because it allows significant reduction of torques. However the literature review shows that the gravity balancing of robotic systems is carried out by weightless springs. For many balancing schemes it is the source of errors. This paper deals with an analytically tractable solution for the gravity balancing considering the spring mass. For this purpose, the relationship between the stiffness coefficient of the spring and its mass is provided. Then this relationship is introduced into the balancing equation and spring elastic force is determined taking into account its mass. For zero length springs, the stiffness coefficient of the springs is determined from a quadratic equation and for non-zero length springs from a cubic equation. In this way, an exact balancing of gravitational forces is achieved, which allows improving the balancing accuracy of robotic systems. The efficiency of the suggested approach is illustrated by numerical examples. An application to the balancing of the leg orthosis for robotic rehabilitation is also presented.
Категория: Научные статьи | Нет комментариев »
A Designing of Humanoid Robot Hands in Endo skeleton and Exoskeleton Styles
- Тип контента: Научная статья
- Номер документа: 6617
- Название документа: A Designing of Humanoid Robot Hands in Endo skeleton and Exoskeleton Styles
- Номер (DOI, IBSN, Патент): 978-3-902613-02-8
- Изобретатель/автор: Ichiro Kawabuchi
- Правопреемник/учебное заведение: KAWABUCHI Mechanical Engineering Laboratory, Inc.
- Дата публикации документа: 2007-06-29
- Страна опубликовавшая документ: Япония
- Язык документа: Английский
- Наименование изделия: Не заполнено
- Источник: Humanoid Robots, New Developments,
- Вложения: Да
- Аналитик: Глаголева Елена
") For a serious scientific interest or rather an amusing desire to be the creator like Pygmalion, human being has kept fascination to create something re-plicates ourselves as shown in lifelike statues and imaginative descriptions in fairy tales, long time from the ancient days. At the present day, eventually, they are coming out as humanoid robots and their brilliant futures are forecasted as follows. 1) Humanoid robot will take over boring recurrent jobs and dangerous tasks where some everyday tools and environments designed and optimised for human usage should be exploited without significant modifications. 2) Efforts of developing humanoid robot systems and components will lead some excellent inventions of engineering, product and service. 3) Humanoid robot will be a research tool by itself for simulation, implementation and examination of the human algorithm of mo-tions, behaviours and cognitions with corporeality.
For a serious scientific interest or rather an amusing desire to be the creator like Pygmalion, human being has kept fascination to create something re-plicates ourselves as shown in lifelike statues and imaginative descriptions in fairy tales, long time from the ancient days. At the present day, eventually, they are coming out as humanoid robots and their brilliant futures are forecasted as follows. 1) Humanoid robot will take over boring recurrent jobs and dangerous tasks where some everyday tools and environments designed and optimised for human usage should be exploited without significant modifications. 2) Efforts of developing humanoid robot systems and components will lead some excellent inventions of engineering, product and service. 3) Humanoid robot will be a research tool by itself for simulation, implementation and examination of the human algorithm of mo-tions, behaviours and cognitions with corporeality.
Категория: Научные статьи | Нет комментариев »
Design of an Assistive Gait Device for Strength Endurance and Rehabilitation
- Тип контента: Научная статья
- Номер документа: 6837
- Название документа: Design of an Assistive Gait Device for Strength Endurance and Rehabilitation
- Номер (DOI, IBSN, Патент): 978-3-902613-07-3
- Изобретатель/автор: K. H. Low, Xiaopeng Liu, Haoyong Yu
- Правопреемник/учебное заведение: Dept. of ME, National University of Singapore, School of MAE, Nanyang Technological University
- Дата публикации документа: 2007-06-29
- Страна опубликовавшая документ: Сингапур
- Язык документа: Английский
- Наименование изделия: Не заполнено
- Источник: Humanoid Robots: Human-like Machines, Book edited by: Matthi
- Вложения: Да
- Аналитик: Глаголева Елена
 Exoskeletons for human performance augmentation (EHPA) are controlled and wearable devices and machines that can increase the speed, strength, and endurance of the operator. EHPA is expected to do that by increasing the physical performance of the solider wearing it, including:
Exoskeletons for human performance augmentation (EHPA) are controlled and wearable devices and machines that can increase the speed, strength, and endurance of the operator. EHPA is expected to do that by increasing the physical performance of the solider wearing it, including:
• Increased payload: more fire power, more supplies, and thicker and heavier armor increasing the soldier chance of surviving a direct hit or even an explosion.
• Increased speed and extended range: enhanced ground reconnaissance and battle space dominance.
• Increased strength: larger caliber weapons, obstacle clearance, repairing heavy ma
chinery such as tack.
Категория: Научные статьи | Нет комментариев »
Статистика
Категорий: 179
Статей всего: 2,003
По типу:
Видео: 36
Выдержка с форума: 1
Контактные данные: 12
Научная статья: 1388
Не заполнено: 5
Новостная статья: 317
Обзор технологии: 42
Патент: 219
Тех.подробности: 34
Тип: 1
Комментариев: 10,407
Изображений: 3,005
Подробней...
ТОР 10 аналитиков
-
Глаголева Елена - 591
Дмитрий Соловьев - 459
Helix - 218
Ридна Украина))) - 85
Наталья Черкасова - 81
max-orduan - 29
Елена Токай - 15
Роман Михайлов - 9
Мансур Жигануров - 4
Дуванова Татьяна - 3
Календарь
| Пн | Вт | Ср | Чт | Пт | Сб | Вс |
|---|---|---|---|---|---|---|
| « Ноя | ||||||
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | |||
Авторизация
Ошибка в тексте?
Выдели её мышкой!
И нажми Ctrl+Enter